泌尿外科的增强现实
Augmented Reality
Checcucci, E. et al. (2021). Augmented Reality. In: Huri, E., Veneziano, D. (eds) Anatomy for Urologic Surgeons in the Digital Era. Springer, Cham. https://doi.org/10.1007/978-3-030-59479-4_11
如今,泌尿外科已进入精准外科时代。图像引导手术是最有前途的技术之一,特别是重叠虚拟图像增强患者解剖结构的可能性允许执行增强现实程序 (AR)。 前列腺癌和肾癌手术的初步临床经验揭示了 AR 指导在优化肿瘤学和功能结果方面的潜在益处。 此外,在肾结石的经皮治疗中,AR 有助于外科医生确定穿刺路径。
关键词
增强现实
前列腺切除术
部分肾切除术
HA3D
肾结石
影像引导手术
11.1 简介
如今,技术不断发展,试图满足达到最佳手术计划和肿瘤学结果的需求。为了提高外科手术的疗效和质量,应使用“量身定制”的计划和专用器械 。 2D 横截面成像的 3D 虚拟重建可以帮助外科医生彻底规划手术行为并深入了解手术解剖结构 。 目前,借助专用软件以及泌尿科医师和生物工程师之间的持续合作,可以创建 3D 超精确模型 ,为了解器官的外科解剖和术中方法提供了一种新方法 。
这些系统提供的另一个机会是将虚拟 3D 模型覆盖在手术区域上,在微创手术期间指导外科医生。由于这项技术,增强现实 (AR) 手术可以实际进行 。
数字创建的图像在现实世界环境中的重叠可以定义为“增强现实”(AR)[ 7 ]。
为了正确执行 AR 程序,需要一些基本步骤。 首先,必须创建 3D 手术模型。其次,必须仔细评估真实解剖结构,并且必须重叠 3D 重建。最后,必须正确设置手术系统,以便准确跟踪手术器械、靶器官和周围解剖结构 。 本章的目的是回顾和分析 AR 在泌尿外科手术中的初步应用和潜在的进展或益处。
11.2前列腺癌中的增强现实
目前专注于前列腺癌AR腹腔镜手术的初步经验很少,显示出该技术的不同优势。浮村等人。在腹腔镜根治性前列腺切除术期间使用实时经直肠超声检查,旨在改善肿瘤学和功能结果,具有增强的解剖学前景 [ 9 , 10 ]。最近,Simpfendörfer 及其同事创建了一个 AR 导航系统,以提高术中解剖精度,引导外科医生进行更精确的手术 。
科恩等人。是 AR 的先驱,在 2010 年展示了第一个 AR 机器人辅助根治性前列腺切除术 (RARP),使用的是从 mpMRI 图像创建的 3D 模型。这种实验技术的结果是相关的,因为作者得出结论,这种 AR 程序可以帮助改善学习曲线、功能和肿瘤学结果 [ 12 ]。
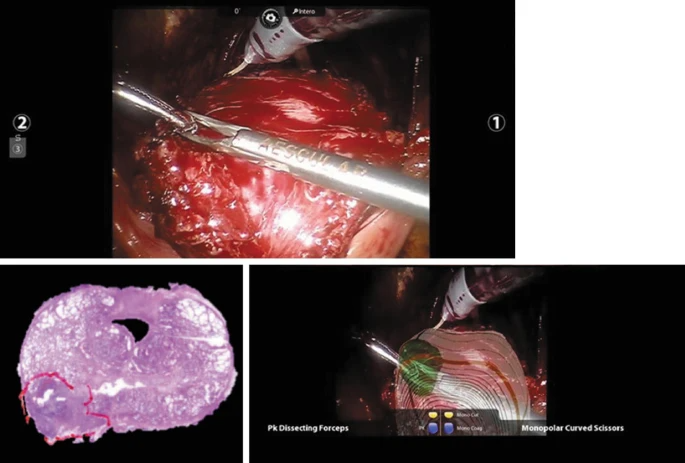
汤普森等人。[ 13 ] 2013年设计了一种术中影像引导系统,并在机器人辅助前列腺根治术中使用:在手术过程中,未经处理的T2图像直接与术中解剖重叠。该系统最初用于尸体标本,后来总共用于 13 名患者。 波皮利亚等人尝试使用 Da Vince 控制台中的集成软件将前列腺的 3D 渲染图像与术中区域重叠,执行 AR 辅助 RARP 对 16 名 cT2 前列腺癌患者进行了筋膜内保留神经技术,而对 14 名 cT3 肿瘤患者进行了标准神经保留技术和手术区域的选择性活检(怀疑包膜外延伸)。pT2肿瘤切缘阳性率为30%,未发现切缘阳性。AR 引导的选择性活检在 11/14 (78%) 活检中证实了前列腺外延伸。扫描了前列腺标本,显示 3D 模型与真实前列腺之间的不匹配从 1 到 5 毫米。 这项工作最近由同一团队 更新。由于术前 mpMRI,11 例被分类为 cT2,而 19 例为 cT3。在所有情况下,在进行病理检查后,指标病变的位置与介入期间与真实解剖重叠的 3D 重建完美匹配(图 11.1 )。由于术前 MRI 被归类为 cT3 的 19 例 (79%) 病例中有 15 例确诊为 pT3a 阶段。在这些患者中,11/15 (73.3%) 在神经血管束的囊外延伸区附近有肿瘤细胞。
图 11.1
前列腺切除后,3D 刚性虚拟模型与体内解剖结构重叠。如 3D 模型所示,放置在索引病变水平的金属夹正确识别了潜在的肿瘤
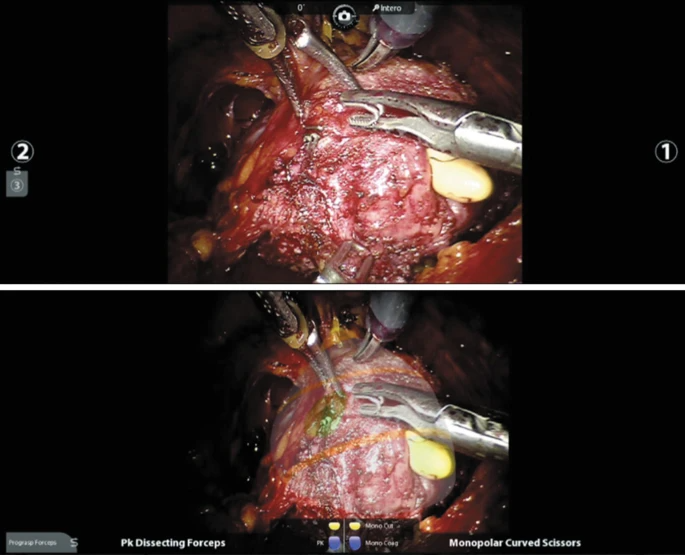
结论评估,当由专家外科医生处理时,这项技术可以达到很高的成功率,在手术的关键步骤中特别有效 。 然而,所有这些技术都意味着使用刚性 3D 模型。 这些刚性和静态结构不能准确地代表实际解剖结构。 在手术过程中,特别是在神经保留阶段,当外科医生在用力阶段用机械臂移动前列腺时,生物组织会不断变形。 在这种情况下,由于应用了非线性参数变量,即“弯曲”和“拉伸”,设计了新的“可变形”3D 重建,以近似目标器官的变形,执行 3D 弹性 AR 辅助 RARP [ 17 ]。“弯曲”变形器使用 Y 轴作为两个方向的主要变形轴,而“拉伸”变形器仅使用 Y 轴。事实证明,这两个变形器在估计手术过程中的前列腺变形方面非常准确。尽管机械臂进行了前列腺牵引,但 3D 弹性重叠系统在动态神经保留阶段确定了 100% 病例中病变的正确识别(图 11.2 )。
图 11.2
在神经保留阶段,弹性增强现实模型正确识别肿瘤位置
11.3肾癌中的增强现实
关于肾癌,尽管发表的作品越来越多,但只有探索性临床研究集中在 AR 应用于部分肾切除术 。 2009 年,苏等人 开发了一种基于术前 CT 图像的无标记术中跟踪系统,执行 AR 实时立体内窥镜机器人辅助肾单位保留程序。在对系统校准至关重要的初始程序之后,执行 3D 到 3D 配准,观察叠加图像与实际手术区域之间的精度仅为 1 mm。 诺斯特拉蒂等人 开发了一种替代技术,可以在内窥镜检查过程中定位可见和隐藏的结构。在具有挑战性的机器人肾单位保留程序中,他们执行了由专用仪器记录的血管脉动提示帮助的程序,与标准方法相比,确定了 45% 的准确度提高 。
2018 年,Wake 等人。发表了一篇视频文章,逐步描述了在机器人肾单位保留手术期间使用 Unity ®软件创建 3D 打印和 AR 肾脏模型。这些模型陆续部署到微软的 HoloLens ®系统中。术前和术中使用 3D 模型和 AR 来协助外科医生。结论评估了 AR 3D 模型的使用是安全、可行的,并且它影响了外科医生的决定,而不是确定手术结果的显着变化 。
2017 年,辛格拉等人 提出了一种 AR 引导系统,在机器人保留肾单位程序的模拟过程中使用超声检查来跟踪病变。记录误差约为 1 毫米,因此作者可以评估该系统可以显着减少手术期间切除的肿瘤周围健康组织(30.6 对 17.5 厘米3)。
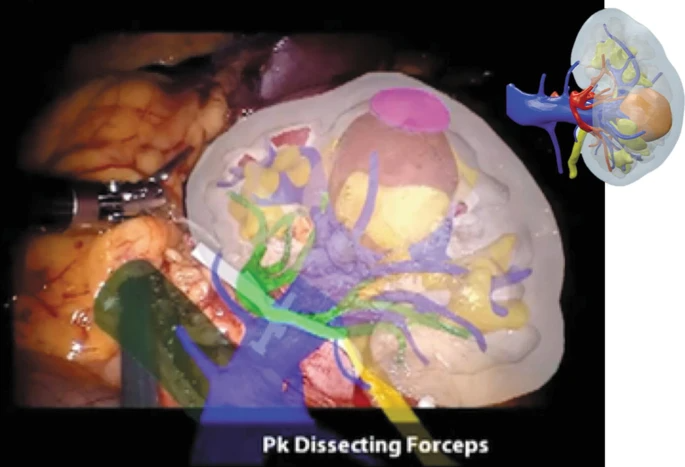
Porpiglia 等人发表了一项开创性的经验。 他使用 Tile-Pro® 将超精确模型 (HA3D™) 与 Da Vince 软件合并。关于选择性缺血,AR 指导被证明与认知指导一样有效,并为外科医生提供了持续专注于手术领域的机会(图 11.3 )。
图 11.3
与肾脏重叠的 3D 模型可以显示肾脏动脉和静脉,以及实质内的动脉和静脉。此外,还显示了内生性病变
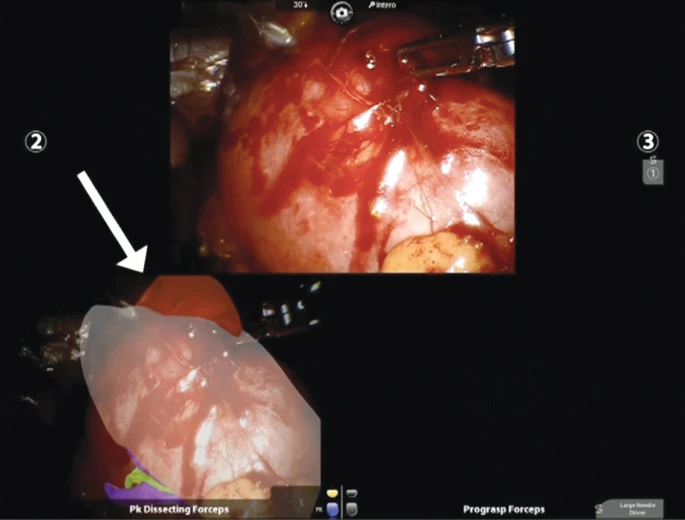
这种初步经验,类似于对前列腺癌进行的 RARP,意味着使用刚性 3D 虚拟模型,无法模拟术中组织变形。 之后,同一个小组与都灵理工大学的工程师合作,开发了一种改进的软件,引入了弹性 AR(图 11.4 )。
图 11.4
3D 弹性增强现实模型正确模拟了肾脏的旋转和变形,从而可以识别从肾脏后表面产生的肿瘤
该系统在识别隐藏的内生性肿瘤时特别有用,当它们位于肾脏后部时也是如此。在手术过程中,为了证明重叠的准确性,使用了内窥镜超声检查,从而显示了虚拟模型和病变之间的完美匹配 [ 24 ]。 还研究了 AR 对外科学习方法的影响:Kobayashi 等人。[ 25 ] 开发了一种软件,允许在机器人 NSS 期间将内窥镜图像与 3D 模型重叠和同步。使用这种方法,评估了两位专家外科医生的技能:特别是对肾动脉的识别和解剖给予了极大的关注。结果表明,低效运动(即“插入”、“拉动”和“旋转”)的数量是如何显着减少的。
11.4其他初步申请
肾脏和前列腺癌手术仍然是 AR 技术的主要应用领域:尽管如此,在非肿瘤手术方面已经取得了一些初步经验。 尤其是肾结石手术,代表了最令人着迷的泌尿外科应用,因为它意味着仔细的术前计划和精确的经皮穿刺。 选择最佳进入位置并进行正确的肾盏穿刺可能是经皮肾镜取石术 (PCNL) 中最重要的步骤。该过程的学习曲线最陡峭,因为它需要全面的解剖知识,并且需要最佳进入上尿路以去除所有结石并降低并发症发生率。 在后来的几年里,AR技术已被用于离体环境中,以规划和引导针的轨迹。将术前 CT 或 MRI 图像、3D 模型和术中超声图像合并在一起进行穿刺:该系统被证明是有效且非常准确的 。
拉斯韦勒等人。 描述了 AR 经皮穿刺的首次体验,使用平板相机在术中图像上叠加 3D 模型。 配准基于基准标记和相机校准。 与其他非 AR 技术(透视和美国)相比,这项体模研究评估了泌尿外科学员的穿刺时间和辐射暴露减少。
2019 年,Akand 等人 ] 试验了一种新技术,该技术使用专用软件(执行数学计算)、3D 建模和 AR 技术在 PCNL 期间进行经皮穿刺,并在两种不同的离体模型中展示了第一个结果。在两个不同的模型中进行了两次不同的实验:第一个模型是放置在凝胶垫中的石头,第二个模型是放置在鸡体内的牛肾。在每次尝试期间,在每个模型中都进行了正确的穿刺。穿刺的准确性是通过感觉石头表面的捻发音和通过 CT 扫描观察针尖与石头的接触来评估的。
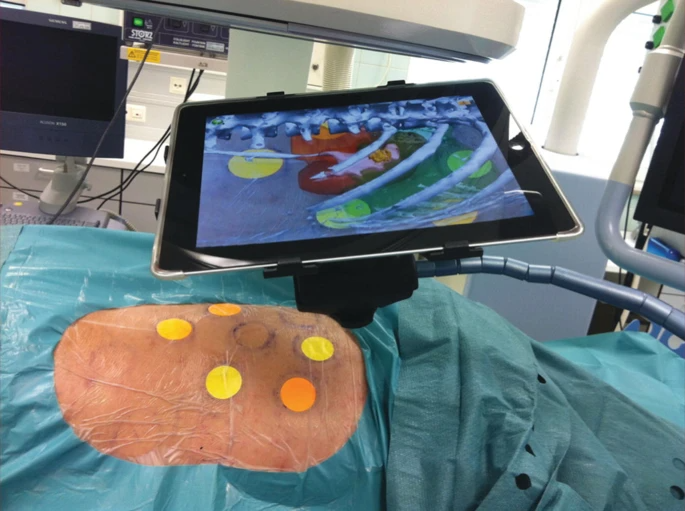
Rassweiler-Seyfried 最近发表了关于 iPad 辅助经皮穿刺的首次人类体验。进行匹配配对分析,将 AR 系统的准确性和有效性与每组 22 名患者的标准程序进行比较(图 11.5 )。
图 11.5
通过 i-pad 重叠的 3D 虚拟图像可以定位肾脏和结石,以指导经皮穿刺。由 Marie-Claire Rassweiler-Seyfried 博士提供 发现辐射暴露时间(在标准技术中 p < 0.01)和穿刺时间(p = 0.01)存在显着差异。 穿刺尝试没有显着差异(p = 0.45)。
11.5局限和未来展望
目前,AR 仍然是一种新生的新兴技术,其局限性需要克服 。记录术中运动和模拟组织变形仍然是两个主要挑战。 可以使用不同的记录设置(例如手动、基于表面、基于基准和 3D-CT 立体),但到目前为止,存在技术限制,这使得精确的实时组织跟踪成为一项挑战 。 为了克服这个限制,已经提出了两种主要方法。第一个意味着应用可以由 AR 系统检测到的内窥镜标志,以便完美地重叠图像 。第二种策略更具挑战性且成本更高,它涉及基于机器学习算法的无标记方法。 组织变形可能是最困难的挑战:生物力学模型正在开发中,实验室结果仍然很复杂,不适合临床实践。 帕扬等人 最近报告说,只有不到十个生物力学建模软件可用于手术实践,强调实时(或至少交互式)模型的计算如何是面临的最复杂的挑战。已经提出了一些有前途的项目[ 34 ],但非线性有限元模型的快速计算仍然是一个未解决的问题。 在这种情况下,Porpiglia 等人。 介绍了 3D 弹性 AR 机器人程序,这要归功于 HA3D™ 重建和非线性参数变形器的应用 。借助这项技术,可以估计目标器官的变形,在考虑到器官变形的情况下,为外科医生在手术的关键阶段提供良好的图像重叠。 未来技术,随着人工智能 的使用,将提供处理更复杂数据的机会,允许准确模拟每个器官的实时组织动力学和变形 。
11.6 结论
在更加量身定制的手术时代,影像引导手术发挥着基础性作用。在可用的不同技术中,增强现实技术可以通过重叠 3D 虚拟模型来增强体内解剖图像,从而提高外科医生对疾病和患者解剖结构的感知。 到目前为止,我们只触及了这项新技术的表面,但临床应用似乎很有希望,为患者带来了潜在的真正好处。